Autonomy, Navigation, Command & Control (ANCC)
ANCC delivers Resilient Mission Autonomy™ for unmanned systems. A platform-agnostic solution trusted by defense and commercial leaders, it enables real-time mission planning, seamless UMAA/OpenAUV compatibility, and adaptability in dynamic environments. Proven in thousands of operational hours across diverse platforms. Engineered for missions where failure is not an option.
Contact Us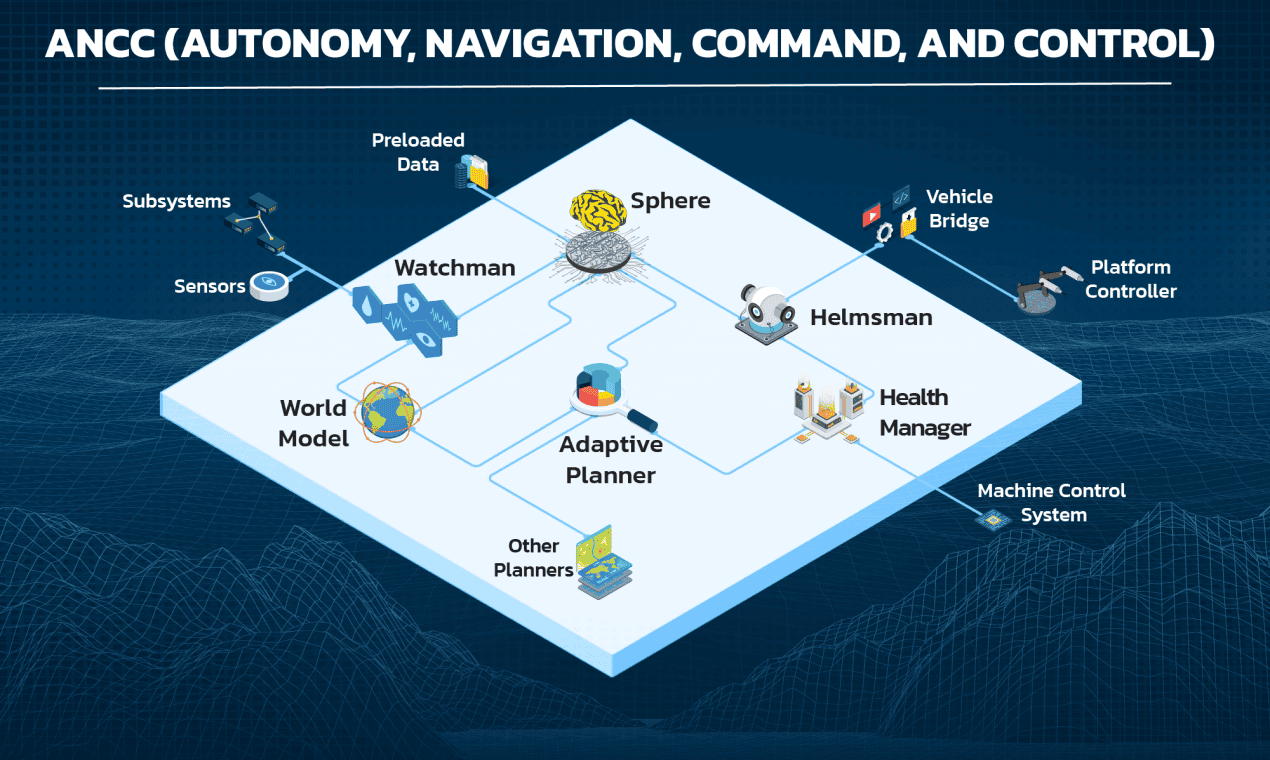
Platform, Sensor, & Domain Agnostic Control System
ANCC is a cutting-edge autonomy solution that integrates seamlessly with any platform, delivering Resilient Mission Autonomy™ across all operational domains. By combining pre-existing (a priori) data with real-time locally sensed environmental and vehicle data, ANCC enables extrospective and introspective decision-making, ensuring mission success in dynamic and uncertain environments.
Resilient Mission Autonomy™
Metron’s core autonomy has been rigorously tested, completing thousands of in-water test hours on more than 10 platforms. ANCC controls vehicle-specific propulsion, payloads, and sensors in accordance with mission concepts of operation, ensuring adaptability and resilience in any environment.
Proven Autonomy
- 14+ Years of Trust: Trusted by defense and commercial autonomous programs.
- Wide Deployment: Deployed on 10 unmanned subsurface vehicles.
- Real-Time Mission Planning: Enables in situ, real-time mission planning and re-planning, with or without a human in the loop.
Mission Resilience
- Averts mission abort or failure in response to environmental or conditional changes.
- Adapts to dynamic situations to accomplish mission objectives.
REMUS 100 & 600
ONR INP LD 2, 3
IVER3
GD Bluefin‑12
Saab Sabertooth
DIVE‑LD
Cellula AUVs
L3H Kuka Arm
Customizable Platform and Payload Control
ANCC offers unparalleled flexibility, supporting a wide range of configurations:
Sensors
FLS, INS, DVL, ADCP, SAS, SSS, MBES, LBL, USBL, and more
Communications
VLF, ACOMMS, RF, Tethered
Payloads
Long‑range sensing, environmental, manipulation, kinetic
Power Modes
Very Low Power Mode, Hibernate
Compatibility
- Data Distribution Service (DDS) communications backbone
- US Navy Unmanned Maritime Autonomy Architecture (UMAA)
- OpenAUV ecosystem
Key Components
WATCHMAN
- Monitors and records adversary contacts and tracks
- Continuously oversees the status of vehicle systems, subsystems, and payloads
SPHERE
- Operator intent‑driven behaviors (dive, transit, loiter, search, survey, anchoring, payload operations, etc.)
- Payload management
- Adapts mission based on detections, patterns, and platform status
- Sensor employment based on in situ environmental conditions and threats
WORLD MODEL
Stores and manages pre‑loaded and in situ sensed environmental data:
- Current, salinity, turbidity, conductivity, temperature, depth
- Bathymetry, obstacles/hazards, keep‑in/ keep‑out areas
POWER MANAGEMENT
- Controls power relays based on mission phase
- Commands relays temporally and sequentially to maintain power bus
HELMSMAN
- Monitors command execution, vehicle navigation and mission progress against predicted success based on current environment and pre-mission sim results
- Issues commands to front seat driver via a custom vehicle bridge
HEALTH MANAGEMENT
- Monitors command execution, vehicle navigation and mission progress against predicted success based on current environment and pre‑mission sim results
- Issues commands to front seat driver via a custom vehicle bridge
ADAPTIVE PLANNING
- Offers on‑board real‑time mission (re)planning for obstacle avoidance, environmental changes, platform health, task success/failure and energy consumption.
VEHICLE BRIDGE
- Custom designed to communicate with a specific platform, enables ANCC to exchange information with a vehicle based on its ICD.
Real World Applications

Real World Applications
Commercial
- survey of construction areas and infrastructure for near and offshore energy and transoceanic cables
- search and rescue operations
- maritime exploration
- mobile sensors
Defense
- extreme duration, undersea missions in deep or contested waters
- perimeter surveillance, reconnaissance, and patrolling
- mine clearance both at sea and on land
Core Technologies
ANCC builds on Metron advances in the multiple research areas.
Autonomy
Metron designs and develops custom Resilient Mission Autonomy™ software that fuses fault detection, diagnosis, prognosis and mitigation with mission requirements, priorities, and platform capabilities.
Explore AutonomySelf-Assessment
Metron is developing technologies to improve mission reliability for unmanned vehicles via improved prognostics, intelligent planning, and adaptive decision making.
Explore Self-AssessmentPerception
Metron develops tools that enable autonomous systems to process sensor data to make flexible planning decisions.
Explore PerceptionWe can help determine if ANCC is right for your application