Unmanned Vehicle and Mission Modeling and Simulation
Modeling and simulation are important tools for developing and testing advanced autonomy that is robust and reliable. At Metron, we use models, simulations, and virtual testbeds to develop new concepts, evaluate autonomy algorithm performance, and test software.
Join Our Team
Modeling and Simulation refers to the process of constructing and manipulating computer-based mathematical, graphical or algorithmic representations of real life systems or phenomena, to study, predict or optimize the behavior of the system(s) / phenomena under consideration.
High-Fidelity Modeling
We model the physical dynamics of the vehicle, the sensors which provide the vehicle an understanding of its environment, and the environment itself to varying levels of fidelity to give us an understanding of how the vehicle will behave in given scenarios and the autonomy’s functionality prior to real world testing.
Our models and simulations include:
- Models to test the performance of individual autonomy algorithms, such as obstacle avoidance and search algorithms
- End-to-end simulations of unmanned missions within simulated dynamic environments including:
- high fidelity physics models for underwater vehicle hydrodynamics
- simulation of ocean environments including currents, bathymetry, and sound and temperature profiles
- simulation of sensors and communications performance

End-to-End Mission Simulation
Metron uses high-fidelity, end-to-end unmanned vehicle mission simulation to test our autonomy during development, to evaluate autonomy behaviors in relevant mission scenarios, and to support hardware and multi-party software testing and integration. This allows us to evaluate our software early and often during development to ensure the correctness and robustness of our algorithms and to reduce costs by increasing the probability of success in the real world.
Simulators include visualizations that allow developers and customers to see what vehicles are doing in response to the environment (e.g., following bathymetry, avoiding obstacles). During development this aspect is crucial to interpreting the complex interactions between the environment and the autonomous vehicle.
Virtual Vehicles and Testbeds
The next step after simulation is to faithfully mimic as much of the unmanned system as possible. With our virtual vehicle we can faithfully reproduce the computing resources, network constraints, and software configurations that will be used with the real hardware. Advanced versions of these virtual setups can incorporate actual hardware starting with modems, computers and sensors all the way to entire vehicles.
Metron’s uses testbeds, or lightweight simulations, to run a visualize specific algorithms lightweight simulations Our obstacle avoidance testbed lets us test different versions of out obstacle avoidance algorithms against a large number of randomly created obstacles. The testbeds quickly show the developer under what conditions the algorithm succeeds or fails

Related Content
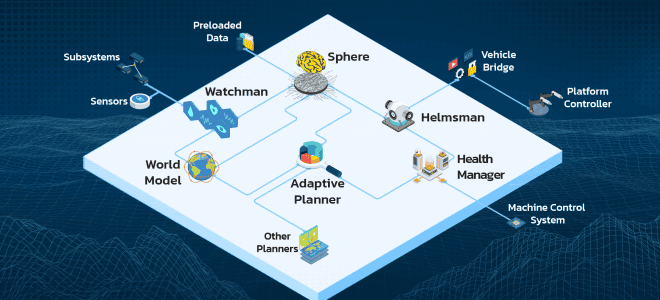
Autonomy, Navigation, Command & Control (ANCC)
ANCC: Platform-agnostic autonomy for unmanned systems. Real-time mission planning, resilient in dynamic environments. UMAA & OpenAUV compatible.
Explore Autonomy, Navigation, Command & Control (ANCC)
Self-Assessment
Metron is developing technologies to improve mission reliability for unmanned vehicles via improved prognostics, intelligent planning, and adaptive decision making.
Explore Self-Assessment
Adaptive Autonomy
Metron develops tools that enable intelligent autonomy for complex and long-duration missions.
Explore Adaptive Autonomy
Perception
Metron develops tools that enable autonomous systems to process sensor data to make flexible planning decisions.
Explore PerceptionVolans
Volans has delivered simulation tools for UUV and USV systems, providing unmatched reliability for defense and energy industry programs for over 13 years
Explore Volans
Metron Careers
Autonomy Career Opportunities
At Metron, experts in autonomy and robotics are overcoming challenges in the field of unmanned vehicle by designing impactful solutions for decision systems, vehicle health monitoring, simulators, and autonomous navigation.